
Fonctionnement d’un A.P.I.
Fonctionnement d’un A.P.I.
La majorité des automates programmables ont un fonctionnement cyclique asynchrone basé sur un cycle de 3 étapes successives :
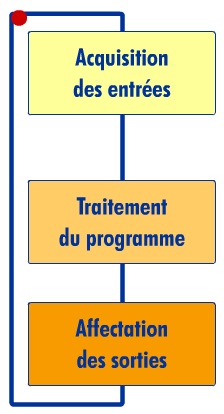
Dans cette étape d’acquisition, l’automate programmable recopie dans une zone mémoire spécifique l’état de toutes ses entrées. C’est à partir de cette recopie qu’il travaillera par la suite. On peut dire qu’il « prend une photo » de l’état de ses entrées.
A partir de l’état des entrées mémorisées, l’automate programmable exécute le programme qui a été écrit. Il réalise les différents traitements prévus et prépare, dans une zone mémoire spécifique, l’état des différentes sorties.
Le traitement étant achevé, l’automate va « recopier » sur ses sorties physiques les états qui ont été déterminés et mémorisés précédemment.
La durée du cycle dépend de l’automate et de la complexité du programme (sa longueur et les traitements demandés). Cette durée va de quelques millisecondes à quelques dizaines de millisecondes. Elle est cependant limitée par une sécurité (le « chien de garde » ou « watch dog ») qui interrompt le cycle et déclenche une procédure d’alerte lorsque le temps de traitement est jugé trop long.
Inconvénients du fonctionnement cyclique
Pendant la phase de traitement, le changement d’état d’une entrée ne sera pris en compte avant le prochain cycle. Si ce changement d’état est fugace (et d’une durée inférieure au temps de cycle), l’automate ne le prendra jamais en compte (ou de manière totalement aléatoire).
Ce fonctionnement est particulièrement préjudiciable dans le cas de signaux émis à fréquence élevée (cas des codeurs incrémentaux lorsque la vitesse de rotation est importante).
Solutions mises en œuvre
Pour pallier à cet inconvénient, certains automates disposent de cartes d’entrée rapides qui utilisent des interruptions du processeur : ce sont des entrées spéciales capables d’interrompre le déroulement du programme normal pour déclencher instantanément un autre programme adapté.